 手机网站
手机网站




六维力传感器在工业打磨和装配领域的应用
发布日期:2020-10-14 09:45:30浏览次数:5929
机器人打磨市场
从国家政策方面来看,核心传感器是作为工业4.0时代的一个很重要的基石,在《中国制造2025》、《“十三五”国家科技创新规划》、《新一代人工智能发展规划》等多个规划里面,都将传感器的研发作为规划重点之一。有相关机构预测,到2025年我国工业互联网市场规模将达到10.8万亿元,其中,传感器作为数据采集的入口、工业互联网的“心脏”,将迎来巨大的发展空间。
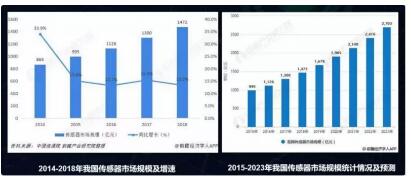
目前,传感器系统也正朝着着微小型化、智能化、多功能化和网络化的方向发展。由中国信通院前瞻产业研究院整理的数据表明,2018年传感器市场规模达1472亿元,同比增长在10%以上,预计在2023年,我国传感器市场规模将达2703亿元。就打磨工艺来讲,大致分为四种,即磨削加工、粗磨、 精磨、去毛刺(清除工件已加工部位周围所形成的刺状物或飞边)。
传统打磨行业痛点
目前来看,传统工业打磨行业普遍都有以下痛点:第一,危险系数大,传统的打磨由于产生的粉尘排出不及时,容易引发爆炸事故危及人身安全;第二,工件一致性差,打磨质量和工人的手法密切相关,工件品质不一;第三,生产效率低,传统人工打磨效率低,还存在废品率高的问题;第四,人工成本高,招工留工难。
机器人打磨的优点
由此来看,机器人打磨是属市场刚需,而机器人打磨也正能很好地解决这些问题,与传统的人工打磨相比,机器人打磨有以下优点:密闭式的机器人工作站,将高噪音和粉尘与外部隔离,减少环境污染;操作工不直接接触危险的加工设备,避免工伤事故的发生;机器人能保证产品加工精度的一致性,不仅保证了质量的可靠,而且降低了废品率;
机器人替代熟练工,不但降低人力成本,而且也不会因为操作工的流失而影响交货期;机器人可以24小时连续作业,生产效率大幅提高;用户可更具不同样件进行二次编程开发,缩短产品改型换代周期,减少相应的投资设备。

六维力传感器是什么?
我们今日的主题是《六维力传感器在工业打磨和装配领域的应用》,那么什么是六维力传感器?
我们先来认识一下力觉传感器,力觉传感器是一类触觉传感器,它在机器人和机电一体化设备中具有广泛的应用。力和力矩传感器是用来检测设备内部力或与外界环境相互作用力为目的,力不是直接可测量的物理量,力是通过其他物理量间接测量出的。
力传感器可用作变换器,如应变元件,它可提供一个与变形、亦即作用于接触点的力成正比的信号。力觉传感器可以检测机器人有关部件(如手腕、手指)所受外力及转矩,可以控制手腕移动,伺服控制,准确完成作业。

六维力传感器是力传感器中一种新发展起来的传感器,能同时转换多维力/力矩信号为电信号,可用于监测方向和大小不断变化的力与力矩和测量加速度或惯性力以及检测接触力的大小和作用点。
广义六维力传感器能够检查空间任意力系中的三维正交力(fx、fy、fz)及三维正交力矩(mx、my、mz),由于其测力信息丰富、测量精度高等特点,主要应用在力及力-位控制场合,六维力/力矩传感器为机器人控制提供力感信息,是智能机器人重要的传感器。
六维力传感器研究现状
国际上对多维力传感器的研究是从20世纪70年代初开始的,主要研究单位有美国的DRAPER实验室、 SRI (Stanford Research Institute,斯坦福研究所)、JPL实验室、IBM公司和日本的日立公司、东京大学等单位。
国内对六维力传感器的研究是在上世纪80年代初期开始的,中科院合肥智能机械研究所于1987 年研制出我国第一台六维腕力传感器,之后陆续有哈尔滨工业大学、华中理工大学、东南大学等单位研制出多种规格的多维力/力矩传感器,展现了我国多维力/力矩信息获取研究领域的蓬勃发展态势。目前在六维力传感器研究较多的院校有燕山大学、哈工大,大连理工等。

近年,研究热点更多的关注在多维力/力矩传感器的应用领域,如现代工业机器人怎么样充分利用多维力/力矩传感器以及其它感知系统来完成各种环境下更多更复杂的机器人作业,使工作更加精确、生产效率更高、成本更低;如将多维力/力矩传感器利用到工业机器人自动装配生产线,结合更实时更有效的算法,使智能工业机器人能够更好的进行精密柔性机械装配、轮廓跟踪等作业。
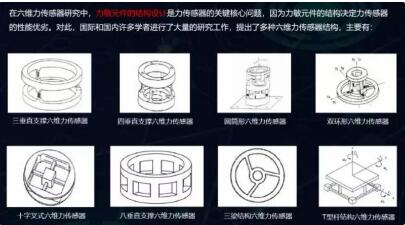
在六维力传感器研究中,力敏元件的结构设计是力传感器的关键核心问题,因为力敏元件的结构决定力传感器的性能优劣。对此,国际和国内许多学者进行了大量的研究工作,提出了多种六维力传感器结构,如下图展示:
工业打磨中的六维力传感器
六维力传感器在工业级的主要运用领域是装配和打磨,打磨是机器人运用很广泛的一个领域,就目前的市场情况来看,对于打磨精度要求较高的行业主要是3C行业,而且3C行业劳动密集度高,迫切需要实现自动化改造。再加上3C行业的柔性化需求,需要更高智能的打磨机器人才能更好的满足市场需求。
六维力传感器通过传感器固定座与机械臂的末端关节固定连接。静态条件下,机械手腕部六维力传感器测得的力和力矩数据由三部分组成,即传感器自身系统误差、负载重力作用、负载所受外部接触力。在加工、装配等工业机器人应用中,机器人末端工具或工件与外界环境的接触力需要被精确的感知,控制系统据此修改机器人的运动,才能保证作业的柔顺性。

传感器的市场挑战
虽然六维力传感器在机器人自由度上可以达到六个维度的自由度,大大提升机器人的智能水平,但是目前工业领域市场上的使用情况并不是很乐观,特别是国内市场用到六维力传感器的打磨机器人产品并不是很多。
目前用到浮动主轴的方式比较多,单维力控。原因主要有两个方面:1、在对精密打磨要求不高的行业,目前的力传感器就能满足打磨工序的需要,企业不愿意花更大的代价去购买配置了六维力传感器的打磨设备;2、目前六维力传感器的价格相对昂贵,更新改造成本较高。
传感器的市场机遇
随着工业加工、制造业的发展越来越精细化,精密装配行业如3C行业对生产机器人的要求也会提高,具备更高性能的传感器如六维力传感器也将迎来新的发展机遇。目前超过 90%的工业自动化作业是传统机器人无法完成的,包括精密打磨、精密装配、机械管理、备料、装货卸货、包装等还未实现完全自动化。人机协作机器人可以部分弥补传统工业机器人的不足,完成机械管理等工作。2015年全球机器人行业及相关服务市场规模为710亿元,预计 2019 年可达 320 亿美元。六维力传感器作为人机协作机器人的重要部件,在人机协作应用中发挥着至关重要的作用。

随着5G时代的到来,工业制造领域迎来一场全新的变革,这轮革新源于新一代信息技术的突破发展,以及市场需求变化和政策的大力推动。因此,制造业必须要进行转型升级,通过融合新的技术将制造水平提升到一个新的高度。
在大数据和物联网的强大支撑下,工业加工、制造业生产的整个产业链会越来越精细化,“柔性”将是未来工业加工和制造业生产的核心竞争力。
本文仅代表作者观点,不代表本站立场。
本文系作者授权发表,未经许可,不得转载。
来源:常州市兰生职业培训学校
本文地址:http://3g.cnc-school.com/article_31.htm


 移动端
移动端
 官方微信
官方微信
 苏公网安备 32041102000081号
苏公网安备 32041102000081号